Improvements on the Phantom-based Leaf Hopper


Brushless motor design offers favorable power-to-weight ratios with relatively less noise, higher efficiency and less mechanical wear. Brushless motors offer more torque per weight, more torque per watt, increased reliability, reduced noise, and a longer lifetime due to no friction of brushes. With no windings on the rotor, they are not subjected to centrifugal forces, and because the windings are supported by the housing, they can be cooled by conduction. Brushless motors have permanent magnets rotating around a fixed armature, eliminating the challenge of connecting current to the moving armature. A solid-state electronic controller (ESC) continually switches the phase to the windings to keep the motor spinning. A brushless motor's velocity is determined by the frequency at which the electricity is switched, not the voltage.






An ESC, electronic speed controller is an electronic circuit which varies an electric motor's speed by providing a three phase low voltage source of energy for the motor.



Kv is the motor velocity constant, measured in RPM per volt (not to be confused with kV, the abbreviation for kilovolt). The Kv rating of a brushless motor is the ratio of the motor's unloaded RPM to the peak voltage on the wires connected to the coils.
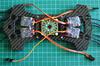
The Flight Controller (FC) is the brain of the multicopter. Data from solid state MEMS gyroscopes, an accelerometer, GPS (global positioning system, barometer and other sensors on the flight controller all feed into the Inertial Measurement Unit (IMU) where the Proportional Integral Derivative (PID) control loop algorithm integrates sensor data with operator input via the radio receiver to control the individual motor speed controllers to achieve the desired flight course.
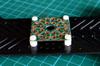
Successfully connected Baseflight configurator to the Naze flight controller after identifying a faulty micro USB cable.




The FPV (First person view) camera will stream live video back to the operator via the 5.8 MHz radio.
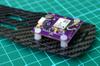
Issue is remedied by abandoning DJI transmitter, installing FrSky D4R-II in Leaf Hopper and adding it the Taranis profiles.





The OSD (On-screen display) takes analog flight data from the flight controller and writes flight data (battery power, altitude, radio signal strength, distance from home...) as text overlayed over the live video feed streaming back to the operator to assist flight control and planning.
The audio/video radio transmitter relays the analog video stream via 5.Ghz radio signal with OSD data overlayed back to the operator goggles.
The FrSky radio receiver transmits user controls to the flight controller and also sends selected flight data back to the transmitter for real time display and/or logging (telemetry).
The GPS (Global Positioning System) receiver receives location and time information over radio from the space-based satellite navigation system where there is an unobstructed line of sight to four or more GPS satellites.